Surgical robot arm project
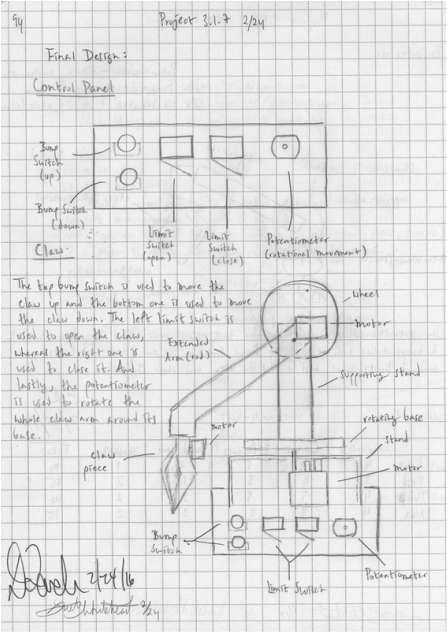
Sketch of final design
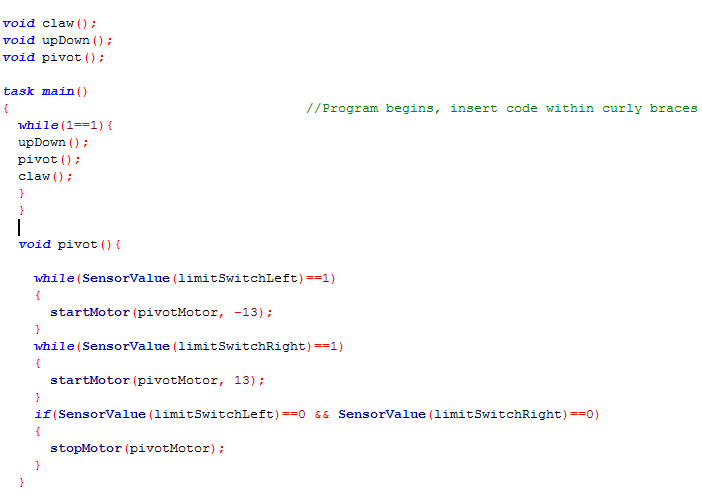
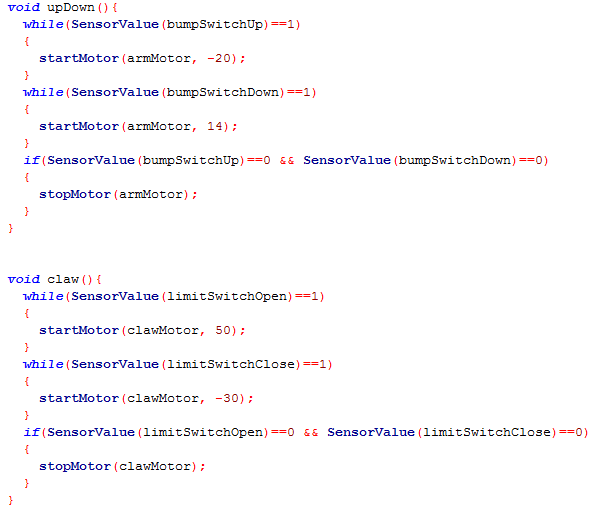
Machine control code
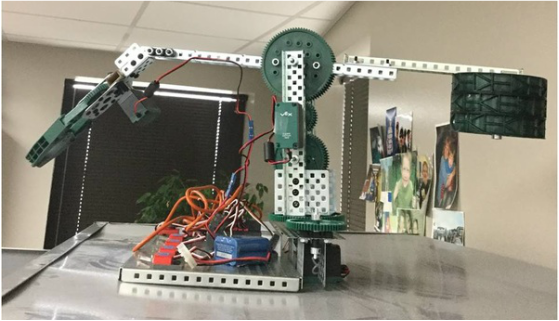
Surgical Robot Arm
Conclusion:
1. Describe the objectives for this project in your own words.
The objective of this project was to build a certain computer controlled machine that had both hardware and software components, which required the use of a VEX kit and ROBOTC software. Our machine was a surgical robot arm that had to be remotely operated with three degrees of freedom of a rotating base, pinching mechanism, and up/down movement. The idea is to use this arm to move equipment (like a scalpel) for a surgical supplier within a sterile environment.
2. What were the most difficult parts of the problem? Describe the difficulties you had with these things.
The first problem we came across was coding the potentiometer so that it controls the pivoting base, which we had a lot of difficulties with. We later determined that debugging the code would be too time consuming, considering our time restraint, so we replaced the potentiometer with left/right limit-switches. Another problem that occurred was the instability of the rotating base, which greatly increased when the "claw" picked up weighted objects. To solve this, we placed two additional gears on the base gear to help stabilize the arm's movements. Overall, we had minimal hardware and software problems, none of which we couldn't solve.
3. List and describe two features that were not part of the design problem that could be added to improve your design.
When testing the robot arm, my team members and I realized that every object the arm picked up had to be within a designated area in order for the claw to be able to reach it and pick it up. A feature that would have helped was to add an additional degree of freedom: the ability to extend and retract. Another problem that I realized was that the arm (because of its length) kept on bumping into objects in its way. One feature that could solve this is to attach a sensor(s) on the arm. Not only so it could stop wrecking my teacher's computer monitors, but so it could serve as a safety mechanism to help prevent someone from getting cut from a scalpel that the arm may potentially hold.
4. Describe how your design and program worked during the official test? Was your design successful? Why or why not?
Our machine worked perfectly during the official test. Needless to say, it was a success. Every degree of movement was achieved, and we managed to captivate all our peers with the arms ability to move a golf ball from the table into a small basket. We experienced no glitches from the software, and the machine stayed intact throughout our whole testing session.
5. Describe some things you learned during this project.
One thing I learned was the efficiency of working in parallel. With two people working on hardware, and two other people working on software, we got through the whole building and coding portion of the project done by the second day. From there on out, it was just playing with the robot arm and creating fun little challenges for ourselves until the official test.
1. Describe the objectives for this project in your own words.
The objective of this project was to build a certain computer controlled machine that had both hardware and software components, which required the use of a VEX kit and ROBOTC software. Our machine was a surgical robot arm that had to be remotely operated with three degrees of freedom of a rotating base, pinching mechanism, and up/down movement. The idea is to use this arm to move equipment (like a scalpel) for a surgical supplier within a sterile environment.
2. What were the most difficult parts of the problem? Describe the difficulties you had with these things.
The first problem we came across was coding the potentiometer so that it controls the pivoting base, which we had a lot of difficulties with. We later determined that debugging the code would be too time consuming, considering our time restraint, so we replaced the potentiometer with left/right limit-switches. Another problem that occurred was the instability of the rotating base, which greatly increased when the "claw" picked up weighted objects. To solve this, we placed two additional gears on the base gear to help stabilize the arm's movements. Overall, we had minimal hardware and software problems, none of which we couldn't solve.
3. List and describe two features that were not part of the design problem that could be added to improve your design.
When testing the robot arm, my team members and I realized that every object the arm picked up had to be within a designated area in order for the claw to be able to reach it and pick it up. A feature that would have helped was to add an additional degree of freedom: the ability to extend and retract. Another problem that I realized was that the arm (because of its length) kept on bumping into objects in its way. One feature that could solve this is to attach a sensor(s) on the arm. Not only so it could stop wrecking my teacher's computer monitors, but so it could serve as a safety mechanism to help prevent someone from getting cut from a scalpel that the arm may potentially hold.
4. Describe how your design and program worked during the official test? Was your design successful? Why or why not?
Our machine worked perfectly during the official test. Needless to say, it was a success. Every degree of movement was achieved, and we managed to captivate all our peers with the arms ability to move a golf ball from the table into a small basket. We experienced no glitches from the software, and the machine stayed intact throughout our whole testing session.
5. Describe some things you learned during this project.
One thing I learned was the efficiency of working in parallel. With two people working on hardware, and two other people working on software, we got through the whole building and coding portion of the project done by the second day. From there on out, it was just playing with the robot arm and creating fun little challenges for ourselves until the official test.
